随风
AI玩具可以说是今年AI圈的香饽饽,无数开发者围绕着小智AI这一项目贡献了数不清的点子和代码,生态圈的丰富程度不断被推向一个全新的高度,然而随着华为推出其陪伴玩具——“你好,憨憨”,AI玩具的开源技术时代可能迎来新的篇章,资本和大厂的入局加速了C端的推广和布局,但也使得原先的“草莽”团队面临巨大挑战,热度的下降,使得原先大众创业的激情退却,冷静的技术革新者将成为最后的玩家,在这条全新的赛道上生存下去。
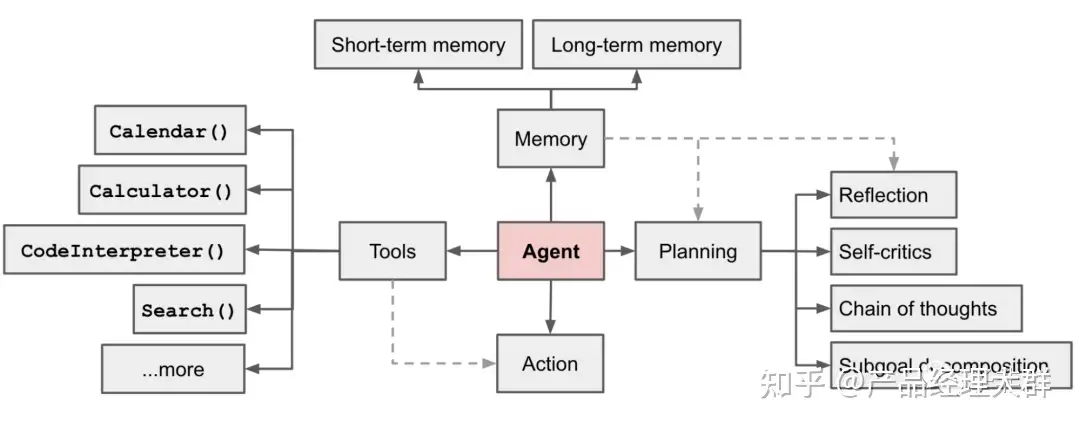
AI玩具的核心卖点依托于大模型带来的强大的情绪计算能力,可以提供一定的情绪价值“在‘单身经济’、‘老龄化’以及‘精细化育儿’等社会趋势下,AI玩具提供了一个随时在线、专属且无压力的情感解决新方案。但实现功能仅仅依靠单一模型是完全不够的,我们需要一个能够实时更新知识,越用越懂我们的智能系统,这是传统的单一大模型所不能提供的,随着AI玩具的发展我们还需要一个能够替代我们“查新闻”,乃至完成一定原来智能手机才能实现的诸如购物,听音乐等功能。这些都需要模型能够实时与环境交互,调用工具乃至进行“边思考,边执行”,这种智能系统就是我们所称为Agent的技术。今年是Agent技术的元年,Agent技术让上述功能成为可能,也可能使得UI时代逐渐消亡,用户第一次用最原始的,最人性化的方式使用我们的高科技产品,而不再需要学习复杂的UI界面,这将是一场深刻的交互革命,它将重新定义人机交互的下一个十年。
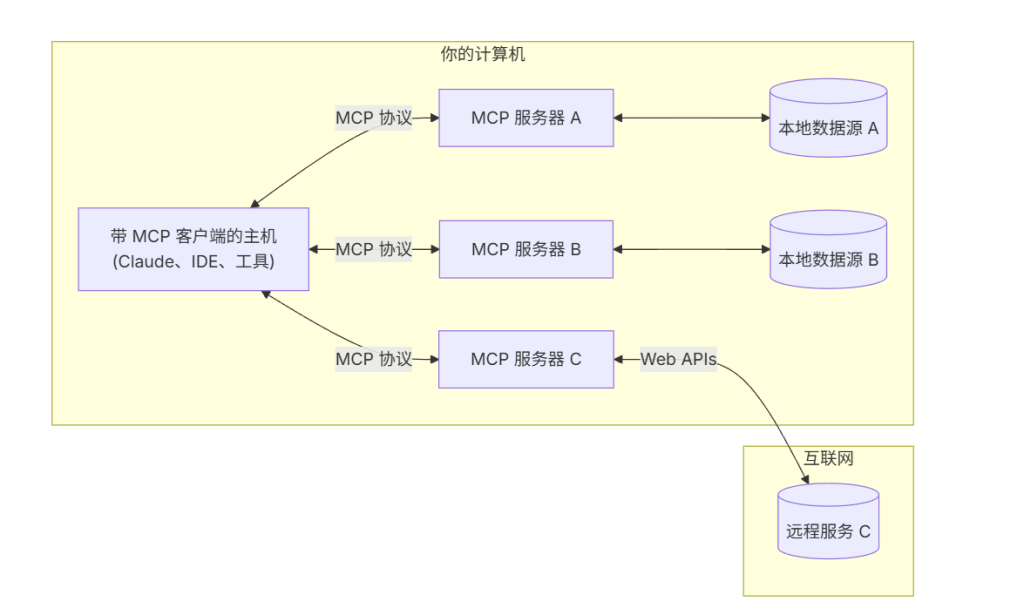
AI玩具的开源生态已经迎来的阶段性终局,Agent系统基本完善,长期记忆和知识库,以及实现“边思考,边执行”的deepseek3.2基座模型。大部分的小智服务端完成了“延时革命”,低延时正成为标配而非卖点,mcp技术的大规模普及使得万物互联,以及外部工具调用不再是天堑。悲观点来说,技术的蛮荒时代已经结束,现在开始的将是一场商业大战,或者说是一场烧钱的生态大战。在C端将是一场IP大战和交互优化的战斗,我们庆幸在蛮荒时代给大家带来了不一样的技术,大大促进了我们社区的发展,已经超过了我们先前的预期,但我们知道创新无止境,八年前我们在IOT的蛮荒时代成长,如今我们社区也逐渐枝繁叶茂,我相信我们依然能在下一个风口给大家带来新的,不一样的东西。而我们正押注的新时代是云端结合的Agent+Iot系统,它将给大家带来全新的体验,个人“贾维斯”时代也许仍然遥远,但未来已至。